Selected projects
List of selected research projects Dr. Errami worked on
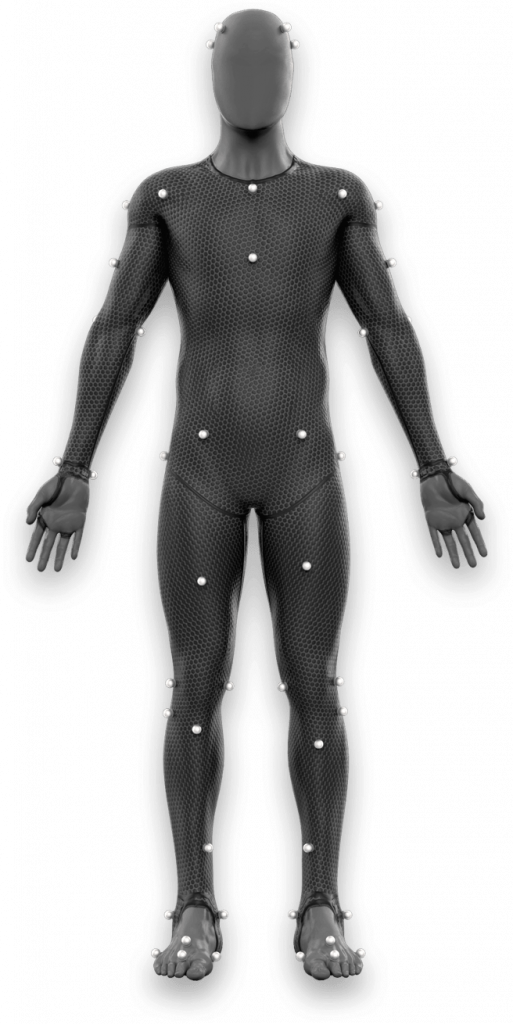
Motion Anticipation
The goal of the project "Motion Anticipation" is the anticipation of full body motions. Combining purely data-driven with physics-based modeling approaches, anticipation of full body motions on the basis of very sparse sensor signals of different nature, e.g., inertial measurement units, EMG sensors, or ground-contact sensors, will be realized. Extending the information on the physics-based layer by model-based anticipation components (including information from balance control, physical constraints) is another important objective to allow robust extrapolations from the range of motions similar to ones recorded in an existing knowledge base to new motion ranges, especially those relatedto disabilities. The anticipated whole-body motions can be used to determine the optimal robot placement for collaborative tasks and for direct entrainment and modulation of ongoing motor behavior. Symbolic labels and trajectories from affordances obtained from other projects of the research unit will be incorporated as additional a priori knowledge on motions, which will reduce computations times, will stabilize short term predictions and even open the door for the method to long-term anticipations.
Funded by: Deutsche Forschungsgemeinschaft (DFG)
Anticipating Human Behavior
In the last years, we have seen a tremendous progress in the capabilities of computer systems to classify image or video clips taken from the Internet or to analyze human pose in real-time for gaming applications. These systems, however, analyze the past or in the case of real-time systems the present with a delay of a few milliseconds. For applications, where a moving system has to react or interact with humans, this is insufficient. For instance, robots collaborating with humans need not only to perceive the current situation, but they need to anticipate human actions and the resulting future situations in order to plan their own actions. In this project, we aim to develop the technology that lays the foundation for applications that require the anticipation of human behavior. Instead of addressing the problem at a limited scope, the project addresses all relevant aspects including time horizons ranging from milliseconds to infinity and granularity ranging from detailed human motion to coarse action labels. To ensure that the developed methods are not limited to a single task but can be applied for a large variety of applications, we do not solve sub-problems in isolation but address the aspects jointly. As a scenario for an application, we focus on service robots that support impaired or elderly people at home. Due to the demographic change, the population structure in Germany will change dramatically. Service robots can fill the gap, but they need the ability to anticipate human behavior at various levels of granularity in order to be accepted and be efficient. The robot needs to know when its help is needed, but it should not stand in the way. Another important aspect in this context is the prevention of accidents. This is in particular very important for elderly people. Predicting accidents before they happen would allow to support the humans in time.
Funded by: ANR (France) / DFG
Symbolic Methods for Biological Networks
(SYMBIONT)
SYMBIONT is an interdisciplinary project ranging from mathematics via computer science to systems biology and systems medicine. The project has a clear focus on fundamental research on mathematical methods, and prototypes in software, which is in turn benchmarked against models from computational biology databases. Computational models in systems biology are built from molecular interaction networks and rate parameters resulting in large systems of differential equations. These networks are foundational for systems medicine. The currently prevailing numerical approaches shall be complemented with our novel algorithmic symbolic methods, which will address fundamental problems in this area. One important problem is that statistical estimation of model parameters is computationally expensive and many parameters are not identifiable from experimental data. In addition, there is typically a considerable uncertainty about the exact form of the mathematical model itself. The parametric uncertainty (with wide potential variations of parameters by several orders of magnitudes) leads to severe limitations of numerical approaches even for rather small and low dimensional models. Furthermore, extant model inference and analysis methods suffer from the curse of dimensionality that sets an upper limit of about ten variables to the tractable models. The main goal of SYMBIONT is to combine symbolic methods with model reduction methods for the analysis of biological networks. Our computational methods are diverse and involve various branches of mathematics such as tropical geometry, real algebraic geometry, theories of singular perturbations, invariant manifolds and symmetries of differential systems..

Physics-based motion analysis and synthesis
The idea of using physics-based models has received considerable interest in computer graphics and
computer vision research. The interest arises from the fact that simple geometric primitives cannot accurately represent natural objects. In computer animation physics-based models are used to generate and visualize constrained shapes, motions of rigid and nonrigid objects and object interactions with the environment for the purposes of animation. On the other hand, in computer vision, the method applies to complex 3-D shape representation, shape reconstruction and motion estimation.
Physically-based analysis and synthesis of (human) motions have a number of applications. They can help to enhance the efficiency of medical rehabilitation, to improve the understanding of motions in the realm of sports or to generate realistic animations for movies and computer games.
Physically-based analysis and synthesis of (human) motions have a number of applications. They can help to enhance the efficiency of medical rehabilitation, to improve the understanding of motions in the realm of sports or to generate realistic animations for movies and computer games.
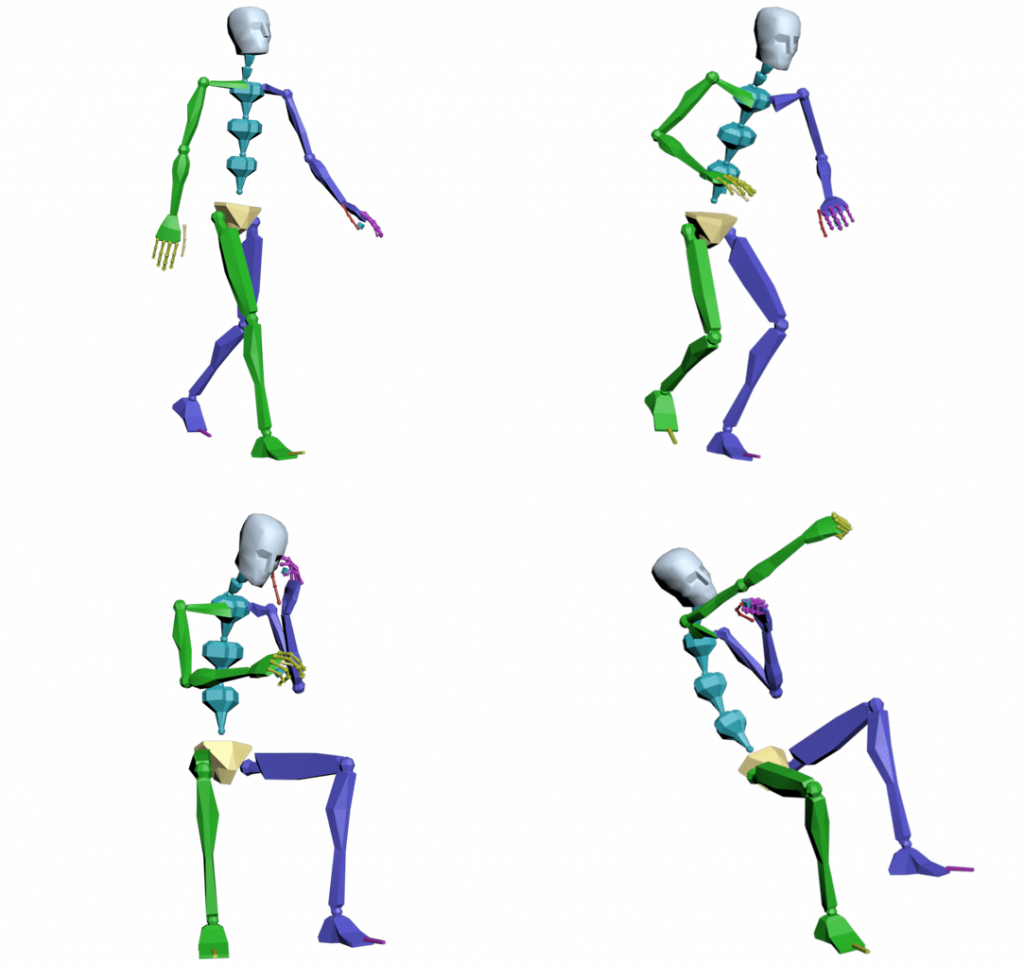
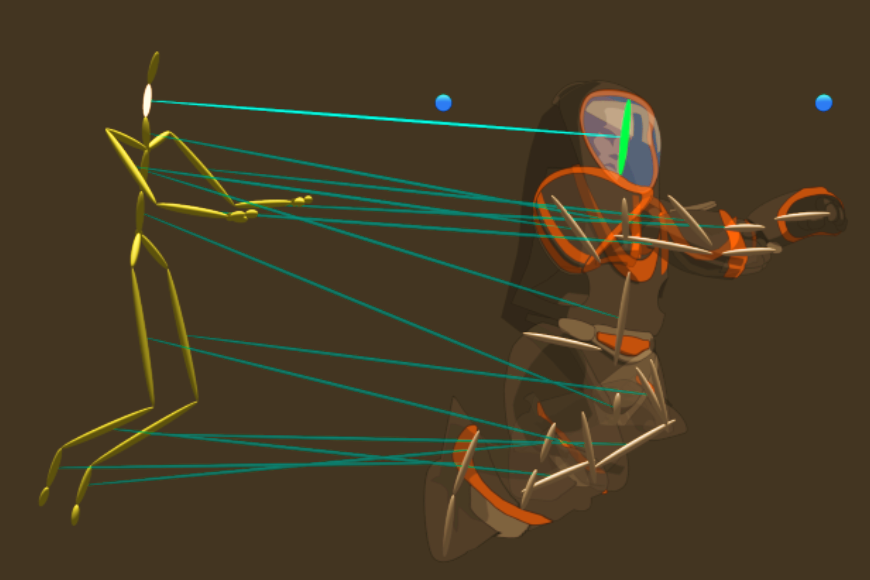
Motion Reconstruction
Motion reconstruction is the process of creating a representation of an object's motion from data. It can be used in a variety of applications, including robotics, virtual reality, video analysis, and animation. It's an important tool for improving the accuracy and realism of motion representation in computer graphics, and for allowing computers to better understand and interact with the world around them.
Creating a human motion reconstruction system from very few constraints imposed on the body has been an interesting and important research topic because it significantly reduces the degrees of freedom to be managed. However, it is a well-known mathematically ill-posed problem as the dimension of constraints is much lower than that of the human pose to be determined. Therefore, it is challenging to directly reconstruct the whole body joint information from very few constraints due to many possible solutions.
Funded by: Deutsche Forschungsgemeinschaft (DFG)
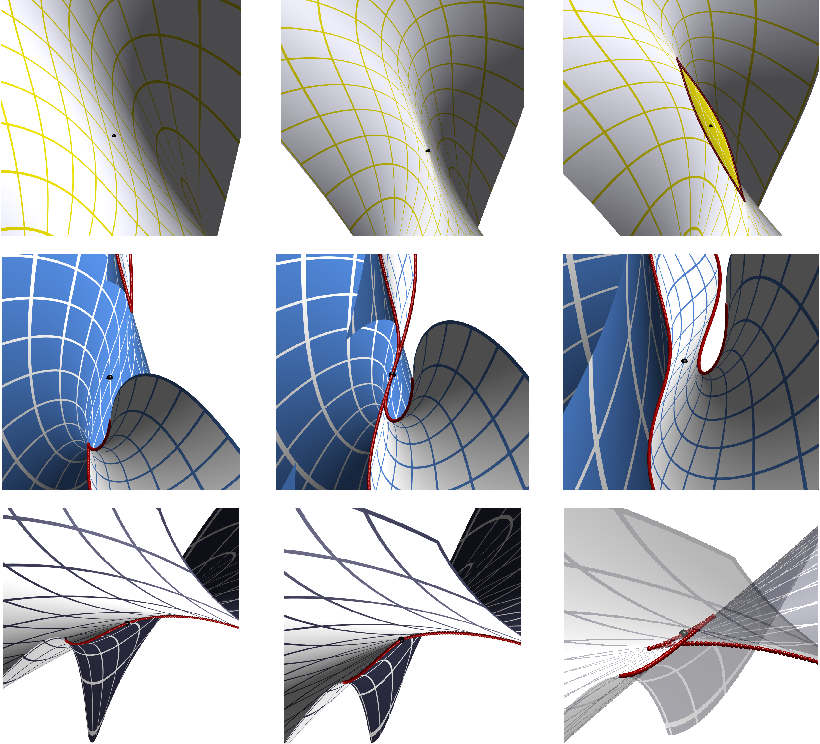
Bifurcations and Singularities of Algebraic Differential Equations (BISADE)
The BISADE Project focuses on the analyse of bifurcations and singularities of algebraic systems of ordinary differential equations with particular emphasis on questions concerning the existence of oscillations. Exploiting previous results that the study of bifurcations for normal systems of ordinary differential equations leads to questions in real algebraic geometry, we will develop efficient algorithmic methods for parametric bifurcation analysis and use them both for experimental mathematical investigations of low dimensional systems and for “real world applications” like the analysis of controllers for humanoid locomotions or the analysis of chemical reaction systems of non-trivial size. Then we will extend these results to non-normal systems, i. e. to differential algebraic equations (DAEs), and study both the effect of singularities on bifurcations and the relationship between bifurcations of DAEs and singularities of asso- cited systems of partial differential equations. Another major goal consists of making all the developed algorithmic methods available in an integrated form in a common software environment.

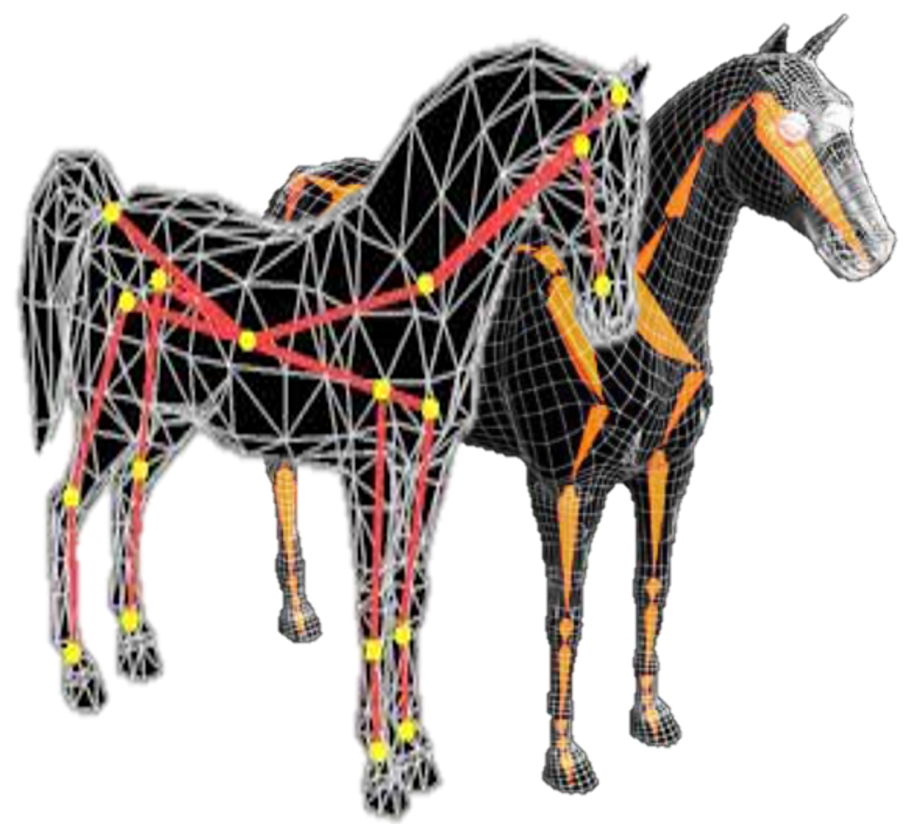
Human Horse Movement Sonification
The idee of the project "Human Horse Movement Sonification" is establishing a mutual reference of research findings between horses and humans: On the one hand, in order to understand and improve the perception and understanding between humans and horses more comprehensively. With an acoustic transformation of kinematic and electromyo-graphic data of horses we want to support a more accurate and reliable diagnosis of various movement patterns of horses. In addition, we want to increase the sensitivity of the riders to the perception of the horse's movements in order to provide them with a more subtle and effective conducting experience. On the other hand, we want to lay a basis for the development of more effective forms of therapy for people with motor impairments. The aim is to apply novel movement acoustics to healthy people and Parkinson patients. We want to show that – relatively enduring – changes in movement patterns based on intermodal conditioning processes can be induced, even with a clearly reduced need of a conscious processing of the movement-acoustic information, as is the case in the horse.

physical-based Hair Modeling
Hair is an essential element for the plausibility of virtual humans. It was however neglected for tenths of years, being considered almost impossible to animate both efficiently and with some visual realism. The great difficulty in modeling and animating realistic hair comes from the complexity of this specific matter: human hair is made of typically 100 000 to 200 000 strands, whose multiple interactions produce the volume and the highly damped and locally coherent motion we observe. Each hair strand is itself an inextensible, elastic fiber.
The primary objective of our hair research is the development of a high-accuracy model for human hair simulation. This includes hairstyle modeling and physical-based hair dynamics simulation.
